2009 Events:
November 18, 2009: "Combining Motion Optimization and System ID for Robotics" by Dr. Ghulam Mustafa, Crossing Automation
Abstract: The speaker will present a novel approach that combines motion optimization and system identification via Taguchi-type design of experiments (DOE) and Monte Carlo simulation for quantifying the manufacturing variability of substrate-handling robots. Motion control optimization refers to selecting a set of parameters that results in system responses that meets the performance specifications. The parameters of a given controller can have opposing effects on the closed loop response of a system. For example, the overshoot and damping behavior are often conflicting control objectives and can pose a challenge for adjusting the parameters of a PID controller. The PID parameters are often determined using ad-hoc methods, such as those proposed by Ziegler and Nichols in the 1940s. The presented statistical approach addresses this challenge and will cover in-situ tests developed for a robotic application, such as the step and frequency response to optimize PID parameters. Furthermore, the test data are also used to identify system dynamics, which indicate that the robot performance depends on damping and stiffness properties that vary within the population of assembled robot mechanisms. The identified system model is then used in conjunction with Taguchi DOE and Monte Carlo simulation with damping and friction as noise parameters. This results in a statistical distribution of performance metrics, such as over-shoot and settling time, which in turn enables a methodical approach for controller tuning.
Bio: Ghulam manages the Reliability Engineering and System Characterization Group at Crossing Automation, where he is responsible for system reliability and performance. Prior to joining Crossing, he worked at United Technologies Research Center where he developed life-cycle models for new technology development, reliability models for hydrogen fuel cells and noise reduction in jet engines. He has worked on wafer handling robots for the past nine years, and on semi-conductor capital equipment for the past fifteen years. Currently, his is involved in implementing modular design methods for wafer handling systems, of particular interest to him are areas of testing, characterization and system identification for health monitoring, failure prevention and preventive maintenance. His areas of interest include system dynamics, measurement, control and all aspects of product reliability. Ghulam can be contacted at gmustafa@crossinginc.com.
October 21, 2009: "Anybots' new telepresence robot QB" by Dr. Trevor Blackwell, Anybots, Inc.
Abstract: The speaker will present Anybots' new telepresence robot QB (see picture).The robot
allows you to be two places at once. You can put the robot anywhere with good Wi-Fi and control it from your desktop
to join meetings, look at prototypes, check inventory, or have impromptu hallway conversations. QB interacts at eye
level, keeps up with people walking, has excellent video and audio quality, and is easy to drive thanks to its
built-in navigation system.


Bio: Trevor Blackwell was a principal in Viaweb, a startup that created the first point-and-click Internet storefront system. The product became Yahoo! Store when Viaweb was acquired by Yahoo! in 1998. Tens of thousands of merchants currently use Yahoo! Store to sell over the web. Mr. Blackwell is also a founding partner in Y Combinator, a new kind of venture firm specializing in early stage startups. Mr. Blackwell received a Ph.D. in 1998 from Harvard University, where he worked on randomized network protocols, randomized compiler optimizations, and other random things. He has published in the proceedings of ACM SIGCOMM, IEEE Infocom, and USENIX. He has also published some widely read technical articles on his personal website.
September 17, 2009: "High-Performance Distributed Robot Control over Ethernet" by Curt Meyers, Willow Garage
Abstract: The speaker will present a novel, hardware and software approach to controlling the
32 motors of Willow Garage's PR2 robot with bus-based, real-time deterministic force control on all DOFs. EtherCAT
(Ethernet for Control Automation Technology), an open, high-performance Ethernet-based fieldbus system, is used
for the distributed robot motion control. All joints are commanded from one computer using real-time extensions.
Current commands are sent at 1 kHz from the computer over EtherCAT to every joint and each joint reports its
angular position and diagnostic information in real-time. The presentation will address the technical challenges
and solutions of this approach that controls approach that is relatively new to robotics.
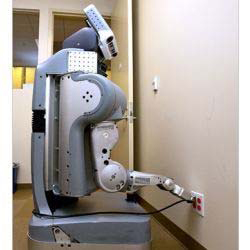
Bio: Curt Meyers is the Senior Electrical Engineer at Willow Garage (https://www.willowgarage.com). He graduated in 1996 from Purdue University with a degree in Computer and Electrical Engineering and then spent ten years writing calibration and diagnostics for the ATE division of Schlumberger in San Jose, CA. In his spare time Curt built robots as a hobby and participated in many competitions, including Robot Wars, Battlebots and the Darpa Challenge. While working on a Darpa Urban Challenge entry with his team Curt met the founder of Willow Garage. The entire Urban Challenge team was hired full-time at Willow Garage in 2007. The first two years have been fast paced, transitioning from an autonomous car to autonomous boats, and now personal robots (see picture).