Robot Demonstrations
Robot demonstrations will be held at 13:10-13:40 and Coffee
Break on November 2,
and also they will be held every Lunch Time and Coffee Break
on November 3 - 4
- Matsuno Lab. (Kyoto University)
"Demonstration of the rescue robots developed in Mechatoronics Lab. " - Tomofumi Fujiwara and Tetsushi Kamegawa
(Okayama University)
"Stereoscopic Presentation of 3D LRF Data" - Quirin Hamp, Leonhard Reindl (University
of Freiburg - IMTEK) and Alexander Kleiner (Linkoping University)
"Ground-Penetrating Radar - the only alternative to canine search!"
- Matsuno Lab. (Kyoto University)
"Demonstration of the rescue robots developed in Mechatoronics Lab. "
In this demonstration, we will introduce three robots, a tele-operated
rescue robot "KOHGA3", an autonomous search robot "HIEI"
and a snake like robot with screw-drive mechanism "Neji-hebi".
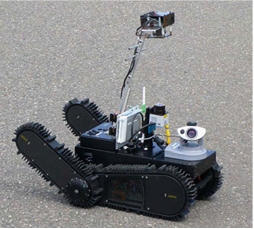
KOHGA3

Tel-operated rescue robot "KOHGA3" is a rescue robot
which focuses to search victims running over the irregular ground
in disaster area. This robot has four individual crawler arms,
a sensor arm with a camera, a LRF, a heat sensor, a CO2 sensor
etc. We develop user interface to remote control this robot intuitively,
and semi-autonomous crawler control method with a simple command
from an operator. The previous version of this robot "HOHGA2"
won the championship of Locomotion Challenge of RoboCup Rescue
2006, Germany.
HIEI

Autonomous searching robot "HIEI" is a rescue robot
which focuses to search victims autonomously in damaged buildings.
This robot builds an environment map autonomously, and sends
information of the victims after finding them using a heat sensor,
a LRF, camera images, a CO2 sensor etc.
Snake-like robot with screw-drive mechanism
(Neji-hebi)
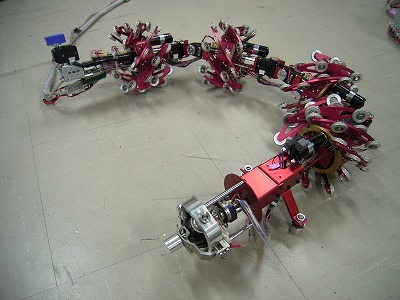
A snake-like robot with screw-drive mechanism "Neji-hebi"
is a prototype of the rescue robots which focus to search in
the narrow space like hollows, pipes etc. This robot can move
omni-direction by controlling four screws individually without
waving motions like a snake.
- Tomofumi Fujiwara and Tetsushi Kamegawa
(Okayama University)
"Stereoscopic Presentation of 3D LRF Data"

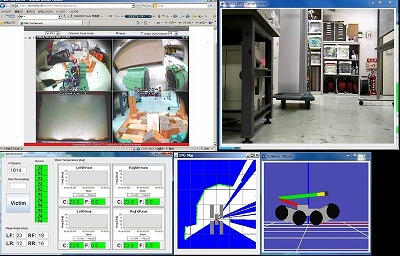
In this demonstration, a stereoscopic presentation system that shows 3D scan data is demonstrated. As shown in above picture, a mobile robot performs 3D scan of the environment and collects a 3D point cloud. 3D scan can be achieved by a rotating platform with two degrees of freedom (2-DOF platform). The platform has a 2D laser scanner and two motors, and performs 3D scan by tilting the scanning plane and then panning the laser scanner. Measured points are transformed into the world coordinate system by using the platform's angle and some translation parameters and 3D odometry data. Then the 3D scan data are transmitted to an operator's PC and displayed in stereoscopic way by OpenGL application. The data are projected onto the screen by a 3D projector. Observers can see stereoscopic images using special 3D glasses.
Related paper: Stereoscopic Presentation
of 3D Scan Data Obtained by Mobile Robot
- Quirin Hamp, Leonhard Reindl (University
of Freiburg - IMTEK) and Alexander Kleiner (Linkoping University)
"Ground-Penetrating Radar - the only alternative to canine search!"

A monostatic ground-penetrating radar is a system able to detect human movements within its radiation cone. The function is based on the comparison of radar waves transmitted by the system and the received signal reflected on the moving surface of a target such as the torso during respiration. If the movement corresponds to human characteristics the so called gBioradarh is able to detect trapped victims up to 8 m in the ground depending on the material within the target and the antenna. The particularity is that the detection is possible whether or not the victim is conscious. This is the reason, why this search technology is the hitherto only efficient alternative to canine search. The used low power microwave radiation is not harmful to persons.
It has been successfully employed several times during disaster response such as after the collapse of the town archive in Cologne, Germany in 2009 and after the Haiti earthquake in 2010. Furthermore, it has been evaluated positively by the Rapid Deployment Unit for Salvage Operations Abroad (SEEBA) of the German Federal Agency for Technical Relief (THW) which recently has been active in Japan after the Tohuko Earthquake in 2011.
The demonstration will consist of the detection of a person located on the opposite side of a wall simulating a trapped condition.
Related paper: Lessons Learned from German Research for USAR