|
|
|
|
|
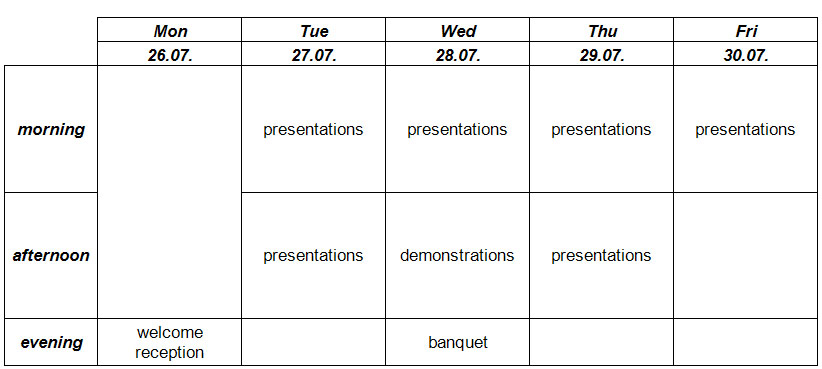
Program OverviewSSRR takes place from 26. to 30. July 2010 at Jacobs University in Bremen, Germany. The rough timeplan is as follows:
The details of the presentations can be found in the SSRR program as PDF. The demo and banquet info is also available as PDF.
Invited TalksBernardo Wagner Abstract: Robot navigation includes the tasks of localization, path planning, object recognition and avoidance as well as vehicle control. Under real-world conditions, these tasks face the challenge of unknown and typically complex obstacle configurations in time-variant environments. The use of rich 3D sensor data provides a promising basis to solve these tasks. For use under real-time conditions, algorithms to extract the desired information from the huge amount of data are required. This data reduction is one main aspect of current systems. In this talk an overview of recent work in the field of localization,
object classification and long-term navigation based on 3D laser-based
sensor data will be presented. The talk concludes with the exemplary appliance
of the work to real-world problems. This includes an autonomous forklift
truck for automated load handling in industrial environments and the autonomous
operation of an unmanned vehicle at the European Land Robot Trials (ELROB).
Andrea Caiti Abstract: Robot navigation includes the tasks of localization, path planning, object recognition and avoidance as well as vehicle control. Under real-world conditions, these tasks face the challenge of unknown and typically complex obstacle configurations in time-variant environments. The use of rich 3D sensor data provides a promising basis to solve these tasks. For use under real-time conditions, algorithms to extract the desired information from the huge amount of data are required. This data reduction is one main aspect of current systems. In this talk an overview of recent work in the field of localization, object classification and long-term navigation based on 3D laser-based sensor data will be presented. The talk concludes with the exemplary appliance of the work to real-world problems. This includes an autonomous forklift truck for automated load handling in industrial environments and the autonomous operation of an unmanned vehicle at the European Land Robot Trials (ELROB).
Davide Scaramuzza Up until three years ago, these cameras were too heavy, expensive, and bulky to be integrated in commercial products. However today, omnidirectional cameras have become sufficiently small to be installed in cars and even carried on small lightweight helicopters. The market of these cameras is increasing and accordingly, the demand for software that enables their use in the real world is rising. In this talk, I will present how to combine omnidirectional vision and robotics in two applications: ground robots and micro aerial vehicles. After a brief overview on omnidirectional vision, I will show some result on vehicle motion estimation for ground vehicles and autonomous flight of micro helicopters by just using a single miniature omnidirectional camera as a sole input.
|
|