Monday, October 24th
These demonstrations will be displayed in the Forum Rolex during the Lunch break.
- (booth 3) A two-tier wireless ad hoc network for multi-robot monitoring and control. Eduardo Feo Flushing, Luca M. Gambardella, Gianni A. Di Caro, IDSIA, Switzerland.
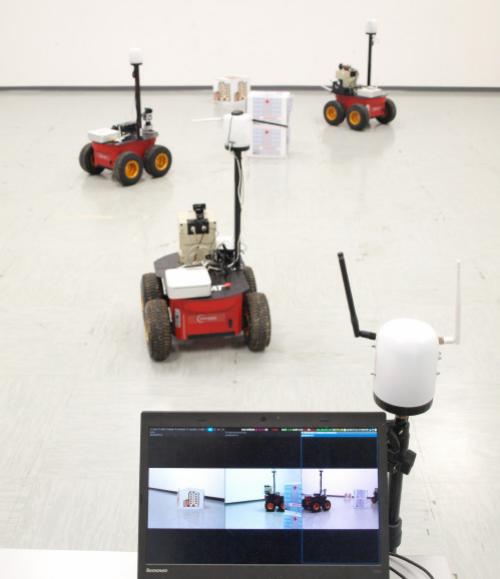
Basic demo setup: three Pioneer P3-AT robots are equipped with the devices of a SymbioBox and are part of a two-tier ad-hoc network. In real-time, image streams from the robots travel in the multi-hop network and are displayed.
- (booth 4) Two Axes Orthogonal Drive Transmission for Omnidirectional Crawler with Surface Contact, Eri Takane, Tohoku University, Japan.

- (Booth 5, outside) IBEX - a tele-operation and simulator platform for walking excavators, Team IBEX, RSL/ETHZ, Switzerland.

IBEX is a motion platform that is used as a simulator for walking excavators as well as for tele-operation of such machines in the field. Thanks to a large range of motion, the moving chair provides a very realistic feedback about the motion of the excavator cabin. In this exhibition,IBEX will be operated together with a realistic simulation environment such that you can test your excavation skills.
- (Booth 6) ANYmal - a quadrupedal robot for rough terrain navigation, Remo Diethelm, RSL/ETHZ, Switzerland.

In this demonstration we will showcase the field-ready quadruped ANYmal. This ruggedized system is driven by custom series elastic actuator units that enable precise joint torque control and high-dynamic locomotion maneuvers. ANYmal is fully autonomous with on-board laser sensors for localization and mapping, batteries for 3h autonomous operation, and a variable payload.
- (Screen in Booth 6) Wearable device, Boris Gromov, IDSIA, Switzerland.

Tuesday, October 25th
These demonstrations will be displayed in the Forum Rolex during the Lunch break.
- (Booth 1) 3D Monocular Reconstruction with a Flying Robot, Davide Falanga, RPG/UZH, Switzerland.
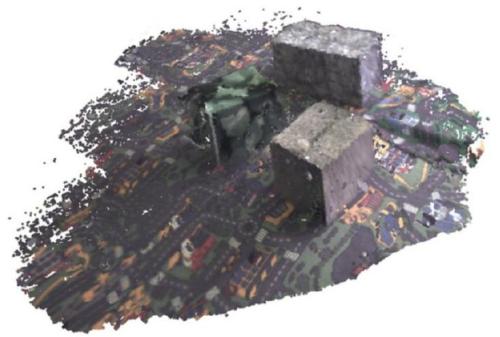
In this demo, we show our monocular, 3D reconstruction system working in real time on a quadrotor. The vehicle is able to navigate through an unknown environment autonomously using only on-board sensing and computing, and collects images of the area while flying. These images are processed on a ground station to obtain a live, dense, 3D map to provide the user with a real time overview of the area of interest. Such a system is suitable for search and rescue missions, where it is often necessary to map an unknown environment in a post-disaster scenario.
- (Booth 2) Aerial-guided Navigation of a Ground Robot among Movable Obstacles, Davide Falanga, RPG/UZH, Switzerland.

Time is the most critical factor in rescue missions. For this reason, we propose to deploy teams of heterogeneous robots, namely ground and aerial robots, to speed up disaster response. In this demo, we demonstrate the benefits of a team of heterogeneous robots in a mockup search and rescue scenario: a victim in an unknown environment must be found and provided with a first aid kit. We first deploy an aerial robot that maps the environment and searches for the victim. Then, a mission is planned for a ground robot to reach the victim and provide it with a first aid kit as fast as possible.
- (Booth 3) Gripper, Masahiro Fujita, Tohoku University, Japan.

Gripper capable of gripping a soft object with low pressure. At disaster sites, it is necessary for robots to grip various kinds of objects. The universal gripper (UG) is an example of a gripping tool, being a soft gripper that exploits the jamming effect of grain inside an elastomer bag. However, the UG cannot fit to objects precisely, because it is filled with coffee granules. Consequently, strong pressure must be used to fit the gripper onto an object. As one approach to overcoming this problem, a method to change the grain quantity is required. Therefore, we have devised a variable-inner-volume mechanism using an air cylinder. The grain quantity changes relative to changes in the inner volume, allowing the variable-inner-volume gripper to grip various objects. Herein, we also measured the pressure necessary for object gripping.
- (Booth 4) Rescue robots, Edlinger Raimund, University of Applied Sciences Upper Austria, Austria.

Wednesday, October 26th
Demonstrations of different EPFL robotics laboratories, including Biorobotics laboratory (Prof. Auke J. Ijspeert), Laboratory of Intelligent Systems (Prof. Dario Floreano) and Reconfigurable Robotics Laboratory (Prof. Jamie Paik). These demonstrations will be in the laboratories located in the EPFL-MED building.