
Downloadable Haptics Symposium Program (PDF).
Downloadable Full IEEE VR Program
Wednesday March 12, 2008
Poster/demo/exhibit setup (12:00-18:00 in Expo C)
Welcome Reception (food provided) 18:00-20:00 in Expo C)
Day 1 - Thursday March 13, 2008
Breakfast (7:00-8:15 in Pre-Function Salon)
Assemble/Welcome (8:15-8:30 in Expo A)
Oral Presentations 15 minutes total with 12 minutes to present and 3 minutes for questions.
Each 30 minute Poster Teaser Session will include presentations of a single powerpoint slide and 1 minute oral presentation for each poster with no time allocated for questions.
Session 1 - Perception I (8:30-10:00 in Expo A) |
||
Paper Title |
Author(s) |
|
| The geometric model for perceived roughness applies to virtual textures | Bertram Unger, Ralph Hollis, Roberta Klatzky | |
| The Integration and Dissociation of Thermal and Frictional Cues during Material Identification | Daniel Shang, Heather Carnahan | |
| Discrimination of Vowels with a Multi-finger Tactual Display | Ali Israr, Charlotte Reed, Hong Tan | |
| Passive and Active Kinesthetic Perception Just Noticeable Difference for Natural Frequency of Virtual Dynamic Systems | Yanfang Li, Ali Israr, Volkan Patoglu, Marcia O'Malley | |
| Localization and Pattern Recognition with Tactile Displays | Lynette Jones, Kathryn Ray | |
| Discrimination of Virtual Square Gratings by Dynamic Touch on Friction Based Tactile Displays | Mélisande Biet, Géry Casiez, Frédéric Giraud, Betty Lemaire-Semail | |
Break (10:00-10:30 in Pre-Function Salon)
Oral Presentations 15 minutes total with 12 minutes to present and 3 minutes for questions.
Session 2 - Dynamics and Controls (10:30-12:00 in Expo A) |
||
Paper Title |
Author(s) |
|
| Adaptive Control of Haptic Interaction with Impedance and Admittance Type Virtual Environments | Amin Abdossalami, Shahin Sirouspour | |
| Haptic Solutions and Bio-Mimetically Inspired Motion Planning Strategy for Rolling-Based Locomotion | Igor Goncharenko, Mikhail Svinin, Shigeyuke Hosoe, Yutaka Kanou | |
| Hybrid Control with Multi-Contact Interactions for 6DOF Haptic Foot Platform on a Cable-Driven Locomotion Interface | Martin J.D. Otis, Charles du Tremblay, Francois-Michel De Rainville, Marielle Mokhtari, Denis Laurendeau, Clément M. Gosselin | |
| Measuring and Increasing Z-Width with Active Electrical Damping | David Weir, J. Edward Colgate, Michael Peshkin | |
| Stability Analysis and Design of Multi-dimensional Haptic Systems | Gianni Bianchini, Marcello Orlandesi, Domenico Prattichizzo | |
| Large Workspace Haptic Devices - A New Actuation Approach | Michael Zinn, Oussama Khatib, Bernard Roth, J. Kenneth Salisbury | |
Lunch 12:00-13:00
Oral Presentations 15 minutes total with 12 minutes to present and 3 minutes for questions.
Session 3 - Rendering and Modeling (13:00-14:30 in Expo A) |
||
Paper Title |
Author(s) |
|
| Haptizing Surface Topography with Varying Stiffness Based on Force Constancy: Extended Algorithm | Jaeyoung Cheon, Inwook Hwang, Gabjong Han, Seungmoon Choi | |
| Data-Driven Haptic Rendering of Visco-Elastic Effects | Raphael Hoever, Matthias Harders, Gabor Székely | |
| Modeling Realistic Tool-Tissue Interactions with Haptic Feedback: A Learning-based Method | Zachary Pezzementi, Daniel Ursu, Sarthak Misra, Allison Okamura | |
| A New Line-based Algorithm for Real Time Haptic Interactions with Virtual Environments | Anderson Maciel, Suvranu De | |
| Perceptual Rendering for Learning Haptic Skills | Timothy Edmunds, Dinesh Pai | |
| A Multi-criteria Design Optimization Framework for Haptic Interfaces | Ramazan Unal, Gullu Kiziltas, Volkan Patoglu | |
Each 30 minute Poster Teaser Session will include presentations of a single powerpoint slide and 1 minute oral presentation for each poster with no time allocated for questions.
Poster Teaser I (14:30-15:00 in Expo A) |
|||
Poster ID |
Paper Title |
Author(s) |
|
213 |
Validation of a 3-D Finite Element Human Fingerpad Model Composed of Anatomically Accurate Tissue Layers | Matt Wagner, Gregory Gerling, Jacob Scanlon | |
118 |
Finger Shell: Predicting Finger Pad Deformation under Line Loading | Mitsunori Tada, Dinesh Pai | |
145 |
Influences of Inter-Stream Synchronization Error on Collaborative Work in Haptic and Visual Environments | Takeshi Fujimoto, Yutaka Ishibashi, Shinji Sugawara | |
187 |
Force Amplitude Perception in Six Orthogonal Directions | Enkhtuvshin Dorjgotov, Gary Bertoline, Laura Arns, Zygmunt Pizlo, Steven Dunlop | |
111 |
Texture meets Text: On the Kinematics of Braille Reading | Barry Hughes, Arend W A Van Gemmert, George E. Stelmach | |
215 |
Validating the Performance of Haptic Motor Skill Training | Xing Dong Yang, Walter Bischof, Pierre Boulanger | |
156 |
Haptic Simulation of Deformable Bodies with Consideration of the Human Sensation of Continuous Forces | Gerhard Schillhuber, Heinz Ulbrich | |
159 |
Perceived Magnitudes of Vibrations Transmitted Through Mobile Device | Jonghyun Ryu, Jaehoon Jung, Seungmoon Choi | |
194 |
Effects of Proprioceptive Motion Feedback on Sighted and Non-Sighted Control of a Virtual Hand Prosthesis | Amy Blank, Allison Okamura, Katherine Kuchenbecker | |
227 |
Haptic-enabled Collaborative Training with Generalized Force and Position Mappings | Saba Moghimi, Shahin Sirouspour, Pawel Malysz | |
205 |
High Bandwidth, Large Workspace Haptic Interaction: Flying Phantoms | Alastair Barrow, William Harwin | |
151 |
Analysis of Registration Accuracy for Collocated Haptic-Visual Display System | Dangxiao Wang, Yuru Zhang, Yu Wang | |
199 |
Virtual Laboratory: a Virtual Distributed Platform to Share and Perform Experiments | Paolo Tripicchio, Emanuele Ruffaldi, Carlo Alberto Avizzano, Massimo Bergamasco | |
242 |
Voxel-Based Haptic Rendering Using Implicit Sphere Trees | Emanuele Ruffaldi, Dan Morris, Federico Barbagli, Kenneth Salisbury, Massimo Bergamasco | |
109 |
Manipulation of Dynamically Deformable Object | Kazuyoshi Tagawa, Koichi Hirota, Michitaka Hirose | |
209 |
Passive Position Feedback over Packet-Switching Communication Network with Varying-Delay and Packet-Loss | Dongjun Lee, Ke Huang | |
236 |
Mediating Time Delayed Teleoperation with User Suggested Models: Implications and Comparative Study | Probal Mitra, Günter Niemeyer | |
240 |
Analysis and Experimentation of a 4-DOF Haptic Device | Andy Ma, Shahram Payandeh | |
152 |
Tangible Images: Runtime Generation of Haptic Textures From Images | Hari Vasudevan, Manivannan Muniyandi | |
238 |
Evaluating ALPHAN: A Communication Protocol for Haptic Interaction | Mohamad Eid, Hussein Al Osman, Abdulmotaleb El Saddik | |
Poster/Demo Session I & Break (15:00-16:00 in Expo C)
All posters and demos will be on display
Oral Presentations 15 minutes total with 12 minutes to present and 3 minutes for questions.
Session 4 - Taction and Teleoperation (16:00-17:30 in Expo A) |
||
Paper Title |
Author(s) |
|
| The Touch Thimble: Providing Fingertip Contact Feedback During Point-Force Haptic Interaction | Katherine Kuchenbecker, David Ferguson, Michael Kutzer, Matthew Moses, Allison Okamura | |
| Graphical Reproduction of Tactile Information of Embedded Lumps for MIS Applications | Mohammadreza Ramezanifard, Saeed Sokhanvar, Javad Dargahi, Wen-Fang Xie, Muthukumaran Packirisamy | |
| Judging the Effectiveness of a Passive Haptic Device in Teleoperation Based on the Average Angular Error in Force Generation | Benjamin Black, Wayne Book | |
| Experimental Internet Haptic Collaboration Using Virtual Coupling Schemes | Ganesh Sankaranarayanan, Blake Hannaford | |
| Telemanipulators with Sensor/Actuator Asymmetries Fail the Robustness Criterion | Lawton Verner, Allison Okamura | |
| Characterizing Teleoperator Behavior for Feedback Design and Performance Analysis | Paul Griffiths, Brent Gillespie | |
Banquet (Sponsored by Immersion Corporation  ) (18:30-20:00)
) (18:30-20:00)
Day 2 - Friday March 14, 2008
Breakfast (7:00-8:30 in Pre-Function Salon)
Oral Presentations 15 minutes total with 12 minutes to present and 3 minutes for questions.
Session 5 - Perception II (8:30-10:15 in Expo A) |
||
Paper Title |
Author(s) |
|
| The Role of Choice in Longitudinal Recall of Meaningful Tactile Signals | Mario Enriquez, Karon MacLean | |
| Haptic Rendering and Psychophysical Evaluation of a Virtual Three-Dimensional Helical Spring | Vinithra Varadharajan, Roberta Klatzky, Bertram Unger, Robert Swendsen, Ralph Hollis | |
| Influence of Visuomotor Action on Visual-Haptic Simultaneous Perception: A Psychophysical Study | Zhuanghua Shi, Sandra Hirche, Werner Schneider, Hermann Müller | |
| Comparison of Skin Stretch and Vibrotactile Stimulation for Feedback of Proprioceptive Information | Karlin Bark, Jason Wheeler, Sunthar Premakumar, Mark Cutkosky | |
| Visual-Haptic Perception of Compliance: Fusion of Visual-Haptic Information | Martin Kuschel, Franziska Freyberger, Roberta L. Klatzky, Martin Buss, Berthold Faerber | |
| Haptic Identification of Stiffness and Force Magnitude | Steven Cholewiak, Hong Tan, David Ebert | |
| Assessment of Vibrotactile Feedback in a Needle-Insertion Task using a Surgical Robot | Sumanth Peddamatham, William Peine, Hong Tan | |
Link to Top of Day 1
Link to Top of Day 2
Each 30 minute Poster Teaser Session will include presentations of a single powerpoint slide and 1 minute oral presentation for each poster with no time allocated for questions.
Poster Teaser II (10:15-10:45 in Expo A) |
|||
Poster ID |
Paper Title |
Author(s) |
|
147 |
Interactive Representation of Virtual Object in Hand-Held Box by Finger-Worn Haptic Display | Kouta Minamizawa, Souichiro Fukamachi, Naoki Kawakami, Susumu Tachi | |
132 |
1DOF Sensor and Display system of Haptic and Temparature Sensation | Hiroaki Yano, Itsuro Hayashi, Hiroo Iwata | |
180 |
Cable-Driven Tactor for Tactile Situational Awareness Systems | Christopher Wagner, Amanda Christiana | |
232 |
Toward Developing a Velocity Controlled Tactile Impact Display | Brian T. Gleeson, William R. Provancher | |
231 |
A Plate Tuning Fork Shaped Tactile Display Using Elastic Waves | Chaodong Li, Hua Yao, Jingjing Xu, Yanyan Zhang, Boqian Kuang | |
163 |
Haptic Implications of Tool Flexibility in Surgical Teleoperation | Mahdi Tavakoli, Robert Howe | |
237 |
Passive Viscous Haptic Textures | Gianni Campion, Andrew Gosline, Vincent Hayward | |
142 |
Tactile Graphics Rendering Using Three Laterotactile Drawing Primitives | Vincent Lévesque, Vincent Hayward | |
148 |
Navigation Guidance Control Using Haptic Feedback for Obstacle Avoidance of Omni-directional Wheelchair | Yasumasa Kondo, Takanori Miyoshi, Kazuhiko Terashima, Hideo Kitagawa | |
121 |
Feel the Pressure: E-learning System with Haptic Feedback | Felix Hamza-Lup, Michele Adams | |
216 |
Visualizing Human Behavioral Features based on Signature Haptic Data | Rosa Iglesias, Mauricio Orozco, Julio J. Valdes, Abdulmotaleb El Saddik | |
204 |
Constructing and Evaluating Vibration Magnitude Models for Visualization | Yuan Wang, Martin Turner, Terry Hewitt | |
223 |
Force-Feedback Surgical Teleoperator: Controller Design and Palpation Experiments | Mohsen Mahvash, Jim Gwilliam, Rahul Agarwal, Balazs Vagvolgyi, Li-Ming Su, David Yuh, Allison Okamura | |
211 |
Haptic Weather | Chaehyun Lee, Bernard Adelstein, Seungmoon Choi | |
120 |
Haptic Simulation of Elbow Joint Spasticity | David Grow, Mengnan (Mary) Wu, Michael Locastro, Sugandha Arora, Amy Bastian, Allison Okamura | |
189 |
A Haptic Interface with Motor/Brake System for Colonoscopy Simulation | Evren Samur, Lionel Flaction, Ulrich Spaelter, Hannes Bleuler, David Hellier, Sebastien Ourselin | |
224 |
RoSS: Virtual Reality Robotic Surgical Simulator for the DaVinci Surgical System | Ankur Baheti, Amrish Kumar, Govindarajan Srimathveeravalli, Kesavadas Thenkurissi, Khurshid Guru | |
203 |
A Tactile Display Presenting Pressure Distribution and Slippage Force | Yiru Zhou, Masahiro Ohka, Tetsu Miyaoka | |
Poster/Demo Session II & Break (10:45-12:15 in Expo C)
All posters and demos will be on display
Link to Top of Day 1
Link to Top of Day 2
Lunch 12:15-13:15
Oral Presentations 15 minutes total with 12 minutes to present and 3 minutes for questions.
Session 6 - Applications (13:15-15:00 in Expo A) |
||
Paper Title |
Author(s) |
|
| Haptic Characteristics of Document Conservation Tasks | Rainer Leuschke, Regina Donlin, Maria Nugent, Marc Claus, Dianne van der Reyden, Blake Hannaford | |
| Toys in the Classroom: LEGO MindStorms as an Educational Haptics Platform | Adam Brandt, Mark Colton | |
| Haptic Guidance Benefits Musical Motor Learning | Graham Grindlay | |
| Full-Arm Haptics in an Accessibility Task | Matt Frey, David Johnson, John Hollerbach | |
| On the Design of a Thermal Display for Upper Extremity Prosthetics | Keehoon Kim, J. Edward Colgate, Michael Peshkin | |
| Using Haptics to Convey Cause and Effect Relations in Climate Visualization | Nesra Yannier, Cagatay Basdogan, Serdar Tasiran, Omer Lutfi Sen | |
| Modeling of the Lap-Band® for Laparoscopic Adjustable Gastric Banding Operation | Woojin Ahn, Daniel B. Jones, Doo Yong Lee, Suvranu De |
|
Awards and Announcements (15:00-15:30 in Expo A) (Sponsored by Immersion , Force Dimension  , and SensAble Technologies
, and SensAble Technologies  )
)
Adjourn (15:30)
Poster and demo take-down (15:30-17:00 in Expo C)
Link to Top of Day 1
Link to Top of Day 2
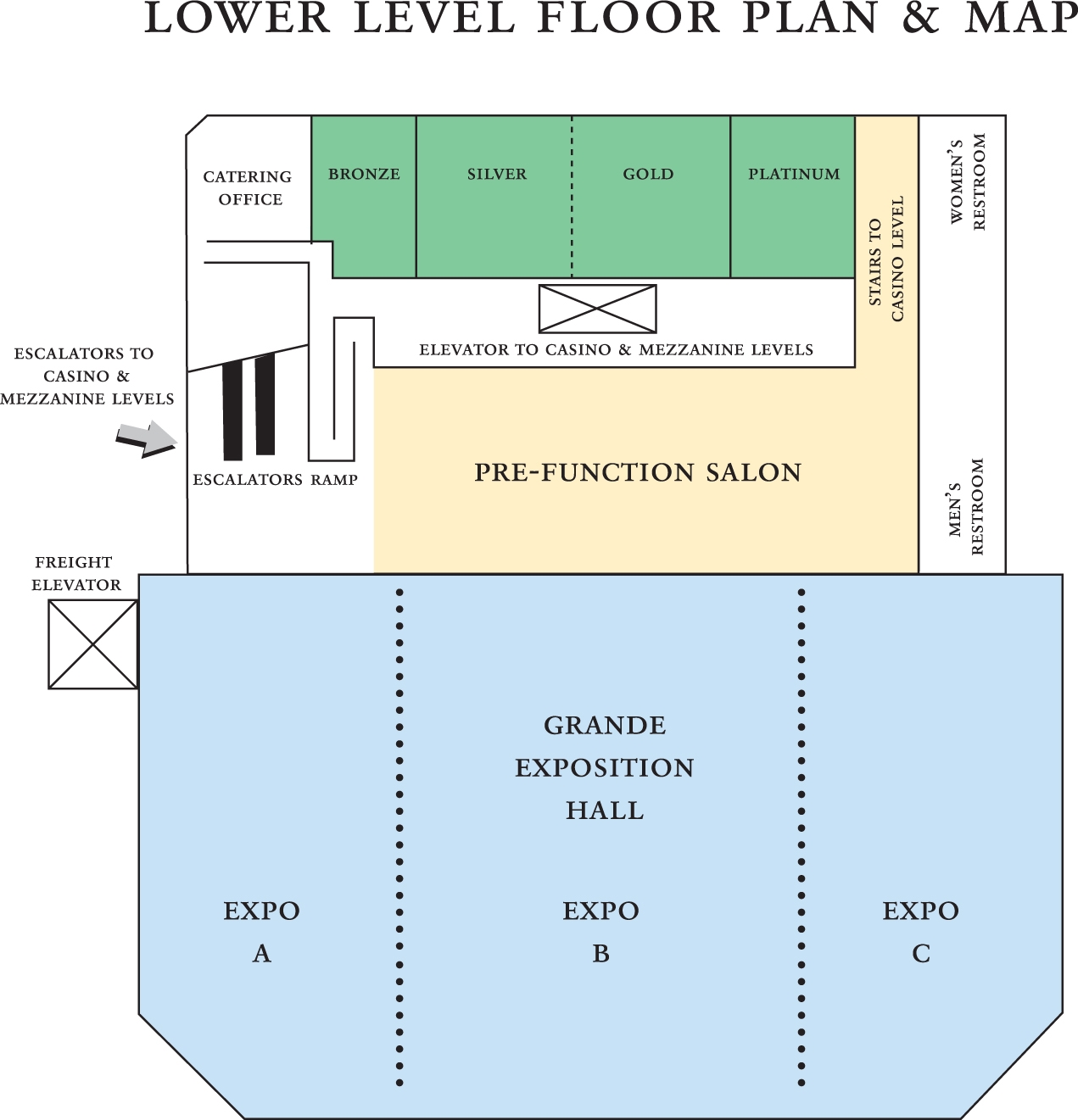
Room Map of Silver Legacy Hotel (linked from Hotel Site by permission)
Link to Top of Day 1
Link to Top of Day 2