October 17-21, 2018 World Robot Summit 2018 | August / October 2020 World Robot Summit 2020
Disaster Robotics Category
Plant Disaster Prevention Challenge
Detailed rules will be updated as necessary. We will keep you informed about any progress. (Latest version as of Aug.24, 2018).
Outline
Inspecting or maintaining infrastructures based on set standards(e.g. opening/closing valves).
More details such as rules will be notified after the selection of participants.
Task P1
Daily Inspection/
Maintenance
Task P2
Fault Detection
Task P3
Diagnosis
Task P4
Disaster Response
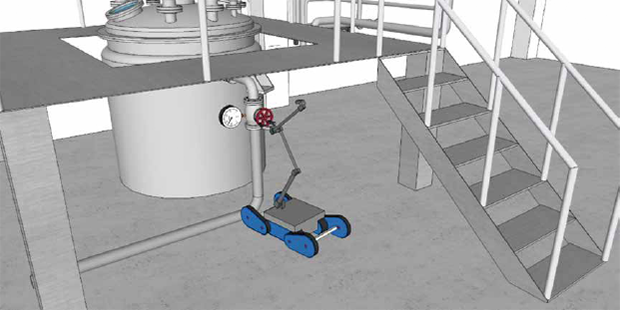
Task P1
Daily Inspection/Maintenance
Read the numerical value of meters etc installed at specified positions via camera and adjust the corresponding valves etc.
Task Conditions
- Mobility
- Aisle(partially narrow), stair, pipe. Materials are concrete, grating and so on.
- Sensing/
Manipulation - The position and shape of the operation objects are prespecified meters, valves, etc. The robot can use pre-installed sensors and hands.
- Environment
- Normal condition of the plant with many complex facilities.
Challenges
Feedback-type operation(adjust valve with reading meter).
Scoring
Practical level speed and accuracy.
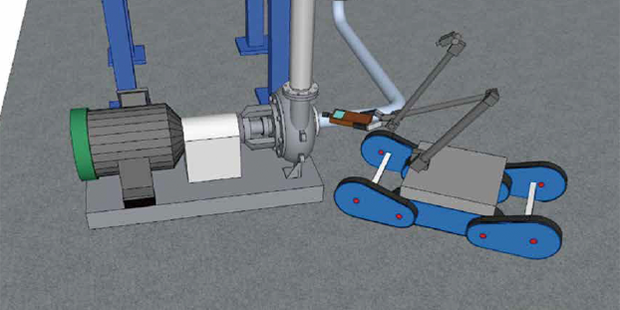
Task P2
Fault Detection
Measure fault sound and/or vibration of pipes of which positions are not specified, and report the measurement results.
Task Conditions
- Mobility
- The same as Task P1.
- Sensing/
Manipulation - The position of the fault events are unknown. The fault events are pre-specified by the competition committee. The robot can use preinstalled device(commercial or self-build) suitable for the events.
- Environment
- The same as Task P1.
Challenges
Fault detection of which position is known. Integration of fault measurement
devices into robot.
Scoring
Practical level speed and accuracy
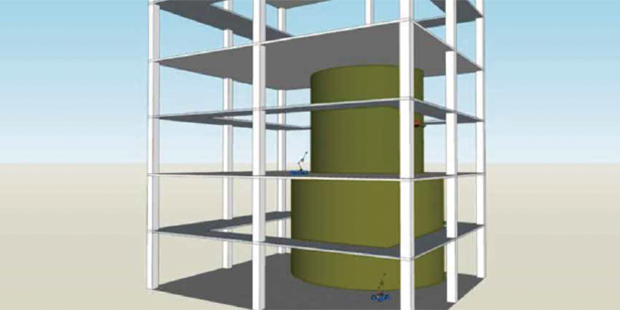
Task P3
Diagnosis
For a large structure, e.g., tank and chimney, diagnose the health of the structure.
Task Conditions
- Mobility
- The same as Task P1.
- Sensing/
Manipulation - The diagnosis object is a whole large structure. The diagnosis object is pre-specified by the competition committee. The robot can use pre-installed devices(commercial or self-build) suitable for the object.
- Environment
- The same as Task P1.
Challenges
Wide area operation. Integration of diagnosis devices into robot.
Scoring
Practical level speed and accuracy.
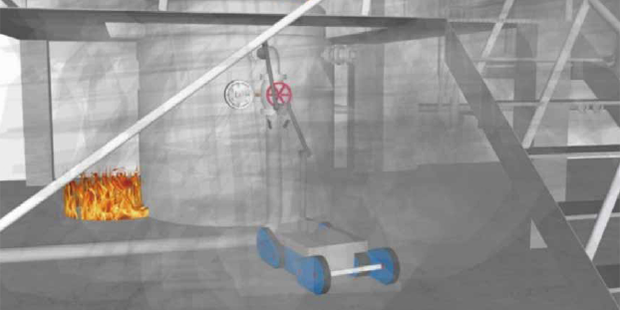
Task P4
Disaster Response
Respond the accident occurred during the inspection. Examine the cause of the accident and proceed the countermeasure under environmental disturbance (e.g., smoke, debris caused by explosion).
Task Conditions
- Mobility
- Task P1 + Debris.
- Sensing/
Manipulation - The operation objects are those in Task P1 and P2, and the ones used for the disaster response(e.g., fire extinguisher).
- Environment
- Disaster environment(unstructured poorly-informed environment with smoke, water, oil, debris, etc.)
Challenges
Comprehensive operation in bad unstructured environment.
Scoring
Practical level speed and accuracy.