Information
- Date
- October 27 Monday - October 30 Thursday, 2014
- Venue
- Toyako-cho Cultural Center, Toyako-cho, Hokkaido, Japan
Program at a Glance
- Oct. 27 (Monday)
- 08:40 Registration
- 09:20 Welcome address
- 09:30 Plenary talk (I) "Organizational aspects concerning the deployment of RPAS in emergency-situations" by Dr. Geert De Cubber (Royal Military Academy of Belgium)
- 10:50 Technical Session(Operation)
- 14:00 Technical sessions(Communication, Explorer), Workshop
- 09:20 Welcome address
- Oct. 28 (Tuesday)
- 09:00 Technical sessions(UAV(1)&Kit, Flexible Robots)
- 11:00 Plenary talk (II) "On the 2000 eruption of Mt. Usu and disaster risk management" by Dr. Hiromu Okada (Crisis and Environmental Management Policy Institute / Hokkaido University)
- 12:00 Lunch (lunch box is served.)
- 13:00 Tour / Mt. Usu, Showa Shinzan, Volcano Science Museum, Volcano Field Walking Trail
- 18:30 Banquet at Toyako Manseikaku Hotel Lake-side Terrace
- 11:00 Plenary talk (II) "On the 2000 eruption of Mt. Usu and disaster risk management" by Dr. Hiromu Okada (Crisis and Environmental Management Policy Institute / Hokkaido University)
- Oct. 29 (Wednesday)
- 09:00 Plenary talk (III) "Humanoid Robotics and Disaster Response" by Prof. Masayuki Inaba (The University of Tokyo)
October 27 (Monday): 1st Day
8:45- Registration / Hall rounge
9:20-9:30 Opening / Arena
9:30-10:30 Plenary Talk I (shared with the workshop) / Arena
- "Organizational aspects concerning the deployment of RPAS in emergency-situations"
- Geert De Cubber (Royal Military Academy of Belgium)
10:30-10:50 Coffee Break / Hall rounge
10:50-12:30 Technical Session : 1AM1-B Operation / Room-B
- #35 "Training and Support system in the Cloud for improving the situational awareness in Search and Rescue (SAR) operations"
- Michal Pelka (Institute of Mathematical Machines), Janusz Bedkowski, Karol Majek, Pawel Musialik, Andrzej Maslowski, Antonio Coelho (INESC), Ricardo Baptista, Ricardo Goncalves, Geert de Cubber (Royal Military Academy of Belgium), Haris Balta, Jose Sanchez (IntegraSys), Shashank Govindaraj (Space Application Services)
- #16 "On-line Optimization of Flexibility and Low Energy for Redundant Manipulator"
- Long Wu (Shanghai University), Wei Song, Linyong Shen, Yanan Zhang, Mamoru Minami (Okayama University)
- #19 "A New Fault Tolerance Method for Field Robotics Through A Self-Adaptation Architecture"
- Yanzhe Cui (Purdue University), Joshua Lane, Richard Voyles, Akshay Krishnamoorthy
- #03 "Emergency Landing for a Quadrotor in Case of a Propeller Failure: A PID Based Approach"
- Vincenzo Lippiello (University of Naples Federico II), Fabio Ruggiero, Diana Serra
- #51 "Safety Considerations for Small Unmanned Aerial Systems with Distributed Users"
- Robin Murphy (Texas A&M University), Brittany Duncan
12:30-14:00 Lunch Break / on own
14:00-18:00 Workshop / Room-B
- Theme: Obstacles on the way to a broad deployment of robot technology in disaster response
- Organizers: Robin Murphy (Texas A&M University), Andreas Ciossek(Cobham Mission Equipment), Gerald Steinbauer(Graz University of Technology)
14:00-15:40 Technical Session : 1PM1-C Communication / Room-C
- #20 "Teleoperation of mobile robots using hybrid communication system in unreliable radio communication environments"
- Ryohei Tsuzuki (Tohoku University), Keiji Nagatani, Genki Yamauchi
- #13 "A Hybrid Lossless and Lossy Compression Scheme for Streaming RGB-D Data in Real Time"
- Mark Coatsworth (Ryerson University), Jimmy Tran, Alex Ferworn
- #36 "Simulated Environment for Wirelessly Controlled Robots Using the Natural Behavior of Radio Waves"
- Masaru Shimizu (Chukyo University), Tomoichi Takahashi (Meijo University)
- #02 "An Interactive Visualization System for Urban Search & Rescue Mission Planning"
- Alexander Bock (Linköping University), Alexander Kleiner, Jonas Lundberg, Timo Ropinski
- #34 "A Microphone Array Configuration for an Auditory Quadrotor Helicopter System"
- Makoto Kumon (Kumamoto University), Takahiro Ishiki
16:00-17:40 Technical Session : 1PM2-C Explorer / Room-C
- #10 "Interacting with a Virtual Destroyed Environment Constructed from Real Disaster Data"
- Alex Ferworn (Ryerson University), Scott Herman, Christopher Kong, Alex Ufkes, Jimmy Tran
- #21 "An Interdisciplinary Approach to Autonomous Team-based Exploration in Disaster Scenarios"
- Björn Gernert (Technische Universität Braunschweig), Sebastian Schildt, Lars Wolf, Björn Zeise (Leibniz Universität Hannover), Paul Fritsche, Bernardo Wagner, Maksims Fiosins (Technische Universität Clausthal), Ramin Safar Manesh, Jörg P. Müller
- #49 "Rendezvous Through Obstacles in Multi-Agent Exploration"
- Victor Spirin (University of Oxford), Stephen Cameron
- #25 "Directed Exploration for Goal Oriented Navigation in Unknown Environments"
- P.G.C.N. Senarathne (Nanyang Technological University), Danwei Wang
- #26 "Frontier Based Exploration with Task Cancellation"
- P.G.C.N. Senarathne (Nanyang Technological University), Danwei Wang
20:00-22:00 Snack Party for Student Participants : / Yakitori Ippei
October 28 (Tuesday): 2nd Day
9:00-10:40 Technical Session : 2AM1-B UAV(1) and Robot Kits / Room-B
- #11 "Image moments-based velocity estimation of UAVs in GPS denied environments"
- Rafik Mebarki (University of Napoli Federico II), Vincenzo Lippiello
- #56 "Visibility-based UAV path planning for surveillance in cluttered environments"
- Vengatesan Govindaraju (National University of Singapore), Gerard Leng, Qian Zhang
- #52 "Characteristics of Indoor Disaster Environments for Small UASs"
- Siddharth Agarwal (Texas A&M University), Robin Murphy, Julie Adams (Vanderbilt University)
- #08 "Aerial-guided Navigation of a Ground Robot among Movable Obstacles"
- Elias Mueggler (University of Zurich), Matthias Faessler, Flavio Fontana, Davide Scaramuzza
- #07 "The Open Academic Robot Kit: Lowering the Barrier of Entry for Research into Response Robotics"
- Raymond Sheh (Curtin University), Haldun Komsuoglu (Robolit LLC), Adam Jacoff (National Institute of Standards and Technology)
9:00-10:20 Technical Session : 2AM1-C Flexible Robots / Room-C
- #23 "Experimental Determination of Control Parameter Intervals for Repeatable Gaits in Modular Snake Robots"
- Kamilo Melo (KM-RoBoTa), Laura Paez
- #33 "A Sound-based Online Method for Estimating the Time-Varying Posture of a Hose-shaped Robot"
- Yoshiaki Bando (Kyoto University), Katsutoshi Itoyama, Masashi Konyo (Tohoku University), Satoshi Tadokoro, Kazuhiro Nakadai (Honda Research Institute Japan Co., Ltd.), Kazuyoshi Yoshii (Kyoto University), Hiroshi Okuno (Waseda University)
- #54 "Evaluation of Snake Robot's Behavior Using Randomized EARLI in Crowded Obstacles"
- Tetsushi Kamegawa (Okayama University), Ryoma Kuroki, Akio Gofuku
- #55 "Semi-autonomous Centipede-like Robot with Flexible Legs"
- Masahiro Masuda (Hosei University), Kazuyuki Ito
10:20-10:50 Coffee Break / Room-D
11:00-12:10 Plenary Talk II / Arena
- "On the 2000 eruption of Mt. Usu and disaster risk management"
- Hiromu Okada (Crisis and Environmental Management Policy Institute / Hokkaido University)
12:10-12:50 Lunch (with Lunch box)/ Arena
13:00-17:30 Volcano Tour
18:30-20:30 Banquet / Manseikaku Hotel Lakeside Terrace
October 29 (Wednesday): 3rd Day
9:00-10:20 Plenary Talk III / Arena
- "Humanoid Robotics and Disaster Response"
- Masayuki Inaba (The University of Tokyo)
- #60 "Field Report: Civil Protection Exercise Gas Storage"
- Gerald Steinbauer (Graz University of Technology), Johannes Maurer, Andreas Ciossek (Cobham Mission Equipment)
- #64 "R³: Request a Rescue Robot"
- Gerald Steinbauer (Graz University of Technology), Johannes Maurer, Heimo Krajnz (Professional Fire Brigade Graz)
- #61 "Passive Brachiation. Towards Motion in Trees with Robotic Snakes"
- Andres Trujillo (KM-RoBoTa s.a.s.), Juan Igua, Kamilo Melo
- #63 "Time-Variant Chemical Plume Tracing Inspired by the Silk Moth"
- Jouh Yeong Chew (Tokyo Institute of Technology), Shigaki Shunsuke, Daisuke Kurabayashi
- #65 "Aerial Manipulator Aimed for Door Opening Mission"
- Hideyuki Tsukagoshi (Tokyo Institute of Technology)
- #18 "The HCUAV project: Electronics and software development for medium altitude remote sensing"
- Angelos Amanatiadis (Democritus University), Evangelos Karakasis, Loukas Bampis, Themistoklis Giitsidis, Periklis Panagiotou, Georgios Sirakoulis, Antonios Gasteratos, Philippos Tsalides, Apostolos Goulas, Kyros Yakinthos
- #46 "A Nonparallel Hexrotor UAV with Faster Response in Position Control"
- Guangying Jiang (Purdue University), Richard Voyles
- #37 "UAS deployment and data processing during the Balkans flooding"
- Geert de Cubber (Royal Military Academy of Belgium), Haris Balta, Daniela Doroftei, Yvan Baudoin
- #31 "Observation and Measurement in Disaster Areas using Industrial Use Unmanned Helicopters"
- Akira Sato (YAMAHA Motor co.,LTD), Hiroaki Nakanishi (Kyoto University)
- #15 "Task Priority Control for Aerial Manipulation"
- Angel Santamaria-Navarro (IRI, CSIC-UPC), Vincenzo Lippiello (University of Naples Federico II), Juan Andrade-Cetto (IRI, CSIC-UPC)"
- #24 "Real-Time Point-Cloud Data Transmission for Teleoperation using H.264/AVC"
- Ga-Ram Jang (KITECH), Yong-Deuk Shin, Jae-Han Park, Moon-Hong Baeg
- #53 "Real-Time Moving Objects Tracking for Mobile-Robots Using Motion Information"
- Mahmoud Mohamed (Universtät Paderborn), Christoph Böddeker, Bärbel Mertsching
- #30 "Fast and viewpoint robust human detection for SAR operations"
- Paul Blondel (MIS), Alex Potelle, Claude Pégard, Rogelio Lozano (Heudiasyc)
- #43 "Half Diminished Reality Image Using Three RGB-D Sensors for Remote Control Robots"
- Kazuya Sugimoto (University of Tokyo), Hiromitsu Fujii, Atsushi Yamashita, Hajime Asama
- #50 "Development and Calibration of KaRoLa, a Compact, High-Resolution 3D Laser Scanner"
- Lars Pfotzer (FZI Research Center for Information Technology), Jan Oberlaender, Arne Roennau, Ruediger Dillmann
- #12 "Improvement of Slope Traversability for a Multi-DOF Tracked Vehicle with Active Reconfiguration of Its Joint Forms"
- Genki Yamauchi (Tohoku University), Takahiro Noyori, Keiji Nagatani, Kazuya Yoshida
- #05 "Development of Robotic Spreader for Earthquake Rescue"
- Guowei Zhang (Shenyang Institute of Automation), Bin Li, Zhiqiang Li, Cong Wang, Handuo Zhang, Hong Shang, Weijian Hu, Tao Zhang
- #27 "Development and Field Testing of UAV-based Sampling Devices for Obtaining Volcanic Products"
- Ryosuke Yajima (Tohoku University), Keiji Nagatani, Kazuya Yoshida
- Open discussion to prepare for the RAS workshop that will be held as a part of UN Conference on Disaster Risk Reduction (UN-WCDRR) on March 14-18 in Sendai, Japan.
- Organizer: Satoshi Tadokoro (Tohoku University / IEEE RAS President-Elect)
10:20-10:40 Late Breaking Report : 3AM1-A Short Presentations / Arena
10:40-11:00 Coffee Break / Room-D
11:00-12:40 Technical Session : 3AM2-B UAV(2) /Room-B
11:00-12:40 Technical Session : 3AM2-C Vision /Room-C
12:40-14:00 Lunch Break / on own
14:00-14:30 Poster Session : 3PM1-D /Room-D
14:40-15:40 Technical Session : 3PM1-C Mechanism /Room-C
14:40-17:00 Open Discussion : 3PM1-B Disaster Risk Reduction /Room-B
October 30 (Thursday): 4th Day
10:00-12:00 Field Demonstration /Konpirayama 2000 Eruption Memorial Park
- Volcaniclastic material sampling by a multicopter: Zion
- Tohoku University
- Exploration of destroyed structure by a crowler robot: Scott
- Aichi Institute of Technology
- Bird-eye views by a captive information balloon system: InfoBalloon
- Hokkaido University
- Demonstration flight of an unmanned helicopter: FAZER
- YAMAHA Motor Co., Ltd.
Plenary Talks
Plenary Talk I Oct. 27 (Mon.) 9:30-10:30 / Arena
This plenary talk is shared with the workshop on Oct. 27 afternoon.- "Organizational aspects concerning the deployment of RPAS in emergency-situations"
- by Geert De Cubber (Royal Military Academy of Belgium)
Geert De Cubber was born on February 13, 1979 in Halle, Belgium. In 2001, he received the degree of Master in Engineering at the Vrije Universiteit Brussel (VUB), with as specialization Electro-Mechanical Engineering. He then obtained a PhD. for his research in the field of 3-dimensional reconstruction of natural scenes perceived by mobile robots. Geert joined the Unmanned Vehicle Centre of the Belgian Royal Military Academy (RMA) where his main task is to apply computer vision techniques to mobile robots, rendering these robots able to perceive, analyze, and ? to some degree ? understand their environment. More specifically, three-dimensional reconstruction and cognitive vision approaches are investigated with the aim to port the capabilities of the human eyesight to intelligent robots. Currently, he is the coordinator of the European project ICARUS which targets the development of unmanned tools (land, air and ground robots) for search and rescue activities after a major crisis (earthquake, tsunami). - summary:
- Remotely piloted aircraft systems (RPAS) are more and more being used by emergency management authorities, as they prove to be a very valuable tool, notably for increasing the situational awareness of the first responders. However, these crisis managers are still confronted with important bottlenecks impeding the practical usage of these novel technological tools. Organizational, procedural, legal, ethical and deployment issues need to be tackled prior to starting any operation with RPAS in order to ensure the possibility of rapid deployment in an international context when a disaster does strike. In this presentation, an overview of these "non-technological" aspects requiring community attention are discussed, with the aim of starting a discussion fostering the uptake of RPAS technology for crisis management.
Plenary Talk II Oct. 28 (Tue.) 11:00-12:00 / Arena
- "on the 2000 eruption of Mt. Usu and disaster risk management"
- by Hiromu Okada (Crisis and Environmental Management Policy Institute / Hokkaido University)
Hiromu Okada is an emeritus professor of Hokkaido University and a board member of Crisis and Environmental Management Policy Institute (CeMI). He predicted the eruption of Mount Usu in Hokkaido in 2000, leading to the safety evacuation of residents more than 15,000. He is known as "the doctor in charge of Usu Volcano." - summary:
- under preparation
Plenary Talk III Oct. 29 (Wed.) 9:00-10:20 / Arena
- "Humanoid Robotics and Disaster Response"
 by Masayuki Inaba (The University of Tokyo)
by Masayuki Inaba (The University of Tokyo)
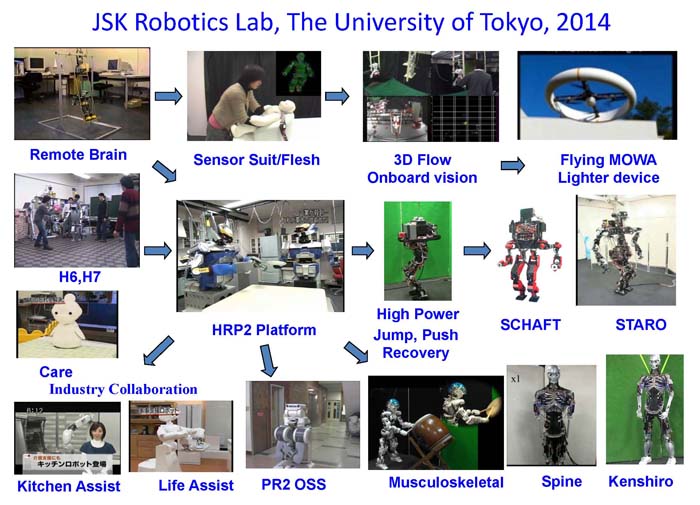
Masayuki Inaba is a Professor in the Information Science and Technology, Graduate School at the University of Tokyo. He graduated from the department of Mechanical Engineering at the University of Tokyo in 1981, and received M.S. and Ph.D. degrees from the graduate school of Information Engineering at The University of Tokyo in 1983 and 1986 respectively. He was appointed as a lecturer in the Department of Mechanical Engineering at The University of Tokyo in 1986, an associate professor in 1989, and a professor in the Department of Mechano-Informatics in 2000, and also a professor in new Department of Creative Informatics from 2005. He is directing the JSK Robotics Lab at The University of Tokyo. His research interests include key technologies of robotic systems and software architectures to advance robotics research. His research projects have included hand-eye coordination in rope handling, vision-based robotic server system, remote-brained robot approach, whole-body behaviors in humanoids, robot sensor suit with electrically conductive fabric, flexible spined humanoid and developmental JSK mother projects with the remote-brained system environment, life-size assistive humanoids, musculoskeletal spined humanoid series, whole-body soft sensor tissues, IRT home assitance with personal mobility, open-source robotics middlewares, high speed-and-powered legs for the next generation humanoid, on the budget from MEXT. The graduate students from his lab created a company SCHAFT with the humanoid technology to apply DARPA Robotics Challenge in 2012 and achieved first place in DRC Trials. He received several awards including outstanding Paper Awards in 1987, 1998 and 1999 from the Robotics Society of Japan, JIRA Awards in 1994, ROBOMECH Awards in 1994 and 1996 from the division of Robotics and Mechatronics of Japan Society of Mechanical Engineers, and Best Paper Awards of International Conference on Humanoids in 2000 and 2006 with JSK Robotics Lab members.- summary:
- Humanoid robotics is the research on intelligent robots that perform
tasks which humans are capable of, in human environments, using tools
used by humans. The DARPA Robotics Challenge that began in 2012 was
designed to be a disaster response challenge with the goal of having a
single robot capable of performing the initial disaster response in
human environments, using equipment and tools used by humans, within
the first twenty-four hours of the disaster' s occurrence. At times
when disasters occur, intelligent robots that perform tasks which only
humans could perform, in human environments using tools used by
humans, are wanted as disaster response robots. This talk will
provide an introduction to the research conducted at the University of
Tokyo, from intelligent robots research to the current humanoid
research, as well as the tasks anticipated in the Disaster Response
Challenge, participating team's approach, and the situation of Japan,
which is advancing towards the finals.
Workshop
"Obstacles on the way to a broad deployment of robot technology in disaster response"
Oct. 27 (Mon.) 14:00-17:30 / Room-B
- Organizers:
- Robin Murphy (Texas A&M University), Andreas Ciossek(Cobham Mission Equipment), Gerald Steinbauer(Graz University of Technology)
- Backgound:
- Due to great advances in research and technology recently robots - mainly unmanned aerial vehicles, but also ground, underwater and surface vehicles ? gained a lot of attention and interest by national and international organizations concerned with disaster response. There are many interesting examples where robot technology has been successfully contributed to the mitigation of disasters such as hurricane Katrina, Tohoku earthquake and tsunami, and recent floods on the Balkan. Although, the technology has been proven to be useful and mature a broad deployment of robot technology and all neighboring technologies such as computer vision and mapping is hardly seen. Obviously, there are still a number of serious obstacles that prevent a broad deployment.
There are still a number of unsolved technical problems such as performance, robustness, endurance, and operability. These questions will be usually addressed by technical programs of events like the SSRR.
- In this special session we like to target other groups of obstacles such as organizational, operational, tactical, legal, and ethical issues. For this session we like to invite responders, policy makers, researchers and industry to discuss which obstacles are in the way and how these obstacles can be removed. It is envisioned to collect these issues but also best practice examples and to initiate the development of a road map.
- In this special session we like to target other groups of obstacles such as organizational, operational, tactical, legal, and ethical issues. For this session we like to invite responders, policy makers, researchers and industry to discuss which obstacles are in the way and how these obstacles can be removed. It is envisioned to collect these issues but also best practice examples and to initiate the development of a road map.
- The related topics are (but not limited to):
- - possible and realistic use cases
- - chain of command and responsibility
- - legal issues and liability
- - operator and responder training for new technologies
- - equipment certification and maintenance
- - models for sharing and providing technology
- - activation mechanisms for technology on national and international level
- - chain of command and responsibility
Schedule
09:30-10:30 Shared Invited Talk
- Geert De Cubber, Royal Military Academy of Belgium
- Organizational aspects concerning the deployment of RPAS in emergency-situations
14:00 - 15:40 Short Presentations
- Tomoichi Takahashi, Masaru Shimizu, Meijo University
- Are licenses necessary to operate rescue robots?
- Elias Mueggler, University of Zurich
- NCCR Robotics: Switzerland's Rescue Robotics Grand Challenge.
- Robin Murphy, A&M University
- Lesson Learned form international Missions.
- Kamilo Melo, EPFL
- Salamander robots, the obstacle lies beyond waterproofing.
- Raymond Sheh, Curtin Uniersity
- Standard Test Methods for Robot Procurement and Operator Training.
16:00 - 17:00 Open Discussions
17:00 - 17:30 Wrap Up and Discussion on Future Activities
Open Discussion
"on Humanitarian Robotics Roadmap for Safety, Security and Rescue to Strengthen Resilience"
Oct. 29 (Wed.) 14:40-17:00 / Room-B
- Organizer:
- Satoshi Tadokoro (Tohoku University / IEEE RAS President-Elect)
- Aims:
- We will make discussion to prepare for the RAS workshop that will be held as a part of UN Conference on Disaster Risk Reduction (UN-WCDRR) on March 14-18 in Sendai, Japan. This is the largest conference of UN Disaster Risk Reduction held every ten years. Ministers from all over the world will participate in the conference, and it has major impact on the policy of each nation. It is surprizing that the pre-document of post-2015 action framework does not include much about technologies, and almost nothing about robotics. We would like to throw a stone by organizing a public forum or a talk in main session.
Tour
"Coexistence with Ever-Changing Earth"
Oct. 28 (Tue.) 12:50-17:30
- 12:15 Lunch (with Obento:lunch box) at Arena
- 12:50 Board a bus at the symposium site (Toyako-cho Culture Center)
- 13:00 Departure
- 13:15 Showa Shinzan /Arrival
- 13:30 Mt. Usu ropeway station (basee)
- 12:50 Board a bus at the symposium site (Toyako-cho Culture Center)
- ropeway(6 min.) - Mt. Usu top(20 min.) - ropeway(6 min.)
- 14:25 Showa Shinzan / Departure
- 14:45 Nishiyama north gate / Arrival
- Nishiyama crater walking trail (1.6km, 60min)
- 16:15 Nishiyama south gate / Departute
- 16:30 Volcano Science Musium / Arrival
- CG theater
- 17:30 Volcano Science Musium / Departure
- 17:35 Hotel Lakeside Terrace / Arrival
No Stylesheet Loaded
Could not load Kickstrap.There are several common reasons for this error.