This year's edition of the ICRA Robot Challenge will be held at ICRA 2012 in Minneapolis. Our goal is to make the Challenge accessible to all members of the ICRA community, to integrate it tightly with the technical aspects of the conference, and to encourage as many participants as possible to bring their teams and participate. This yearŐs challenge will consist of six events:
The Mobile Manipulation Challenge
The Modular Robotic Challenge
The Mobile Microrobotics Challenge
The DARwIn-OP Humanoid Application Challenge
The Manufacturing Challenge
Each challenge is organized individually, but all will be co-located at the conference. To participate in any of the challenges, use the contact information below.
The Mobile Manipulation Challenge(AKA Sushi Boat Challenge)
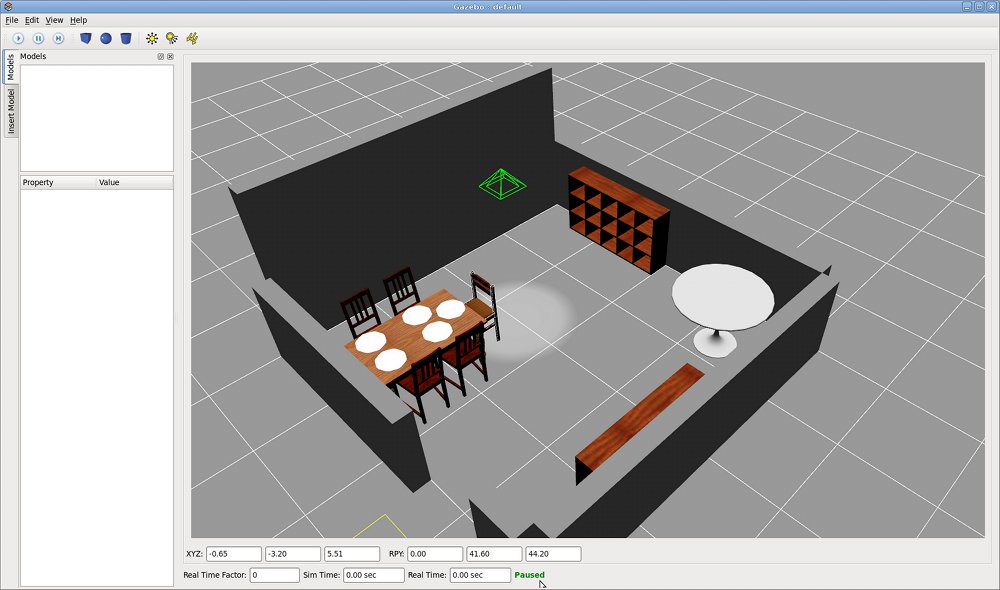
This year a new Mobile Manipulation Challenge will show off the state of the art in integrated perception and manipulation. The challenge models a set of "sushi boat" restaurant tasks: clearing a table, setting a table, and serving from a rotating table.
We will run this challenge at two scales: human and mini. The human scale will use real tables and chairs and dishes. The mini scale will be suited for smaller robots.
Participants are welcome to bring their own robots and software, or to make use of Willow GarageŐs PR2 robots (human scale) or KukaŐs YouBot robots (mini scale) for the challenge. Simulations of the space at both scales will be available in advance.
More information will be available at MobileManipulationChallenge.org.
This challenge simulates an unexpected problem where a robotic solution must be quickly developed and deployed, using only existing resources. The intent of this event is to develop versatile robotic systems and software that can be adapted quickly to address unexpected events. Since humans are present, a natural solution to realistic unexpected events would exploit human creativity and human-robot interaction.
The competition drives not only the development of versatile robotic hardware and on-board software, but also the design and development of programming and assembly tools capable of rapidly implementing a wide variety of capabilities. Since tele-operation is not precluded for this event, the development of effective user interfaces is another expected outcome.
The Environment and Event Parameters
The environment for this event will consist of two areas: a green zone and a red zone. The green zone will represent the human-occupied are from which the robots will be "launched" onto the the red zone (where humans may not enter). Robots must be placed in an airlock chamber and drive (or be driven) out onto the red zone. If a robot needs to return to the green zone, it must do so through the airlock chamber. The airlock will be 1.5m long, 1m wide, and 1m tall, with 1m by 1m doors at each end of the long dimension.
Teams will be allowed to use only what they can carry within one airline suitcase. This maybe any container that weighs less than 50lbs (23kg) and with outside dimensions summing to less than 62 inches (157cm), and weighing 25kg or less. For example, a container 70cm long, 50cm wide, and 30cm tall has a total dimension of 70+50+30 = 150cm, and would be within the size limits. For convenience, we will also allow access to six standard domestic AC power outlets (United States standard NEMA 5-15, 110v, 15A, 60Hz).
The actual unexpected problem to be solved will be announced on the day of the competition. The problems will be constrained to have likely robotic solution that fit the spirit of the competition. For example, you will not be required to have the robot travel 100km to the site of the problem, or to construct a 10-person emergency habitat from freshly-mined regolith. The scope of the task might vary from a short 10 minute task, to one taking several hours. Specific tasks will be announced to all teams simultaneously, and they will work on their solutions independently.
Example Scenarios
To give an idea of the sorts of tasks, here are a few examples. In the past the competition had a space theme where tasks simulated martian or lunar habitat emergencies https://modlabupenn.org/icra/
Antenna recovery
An antenna outside the habitat has been knocked over during a Martian storm. The antenna is crucial to the guidance of a resupply transport, which is scheduled to arrive in 4 hours and an EVA is not safe. The team must develop a robot that can reach the antenna, grasp it and reattach it to its receptacle. The antenna is 10 m from the habitat, sitting on top of a 1m by 2m rectangular base that is 1m tall. The base is visible from the habitat. The antenna is a 1cm cylindrical rod 1m long that fits as a peg into a hole 2cm deep in the base. You have a spare antenna and base in the habitat that can be used for testing purposes.
Base station repair
Sensors have discovered a tear in a thermal covering on the top of a storage shed which contains the habitat's store of liquid nitrogen. The team has 4 hours before the Martian morning arrives and starts to dangerously heat the nitrogen. The team must develop a robot that can crawl on top of the structure, use the supplied patching material, and patch the hole by dispensing a supplied glue. Unfortunately, the structure was not designed to support heavy weights, so the robot must weigh less than 5kg or risk collapsing the structure, with disasterous consequences.
Nuclear power plant repair
You must send a robot into a nuclear power plant and shut off a valve before the power plant explodes. The valve is standard 1/2" pipe ball valve shut off by rotating a 3" lever 90 degrees. The amount of torque required to shut off the valve is not trivial. Access to the critical areas have size constraints - e.g. going through pipes or small channels to reach the lever.
For more details, please contact Mark Yim (yim@grasp.upenn.edu)
Mobile Microrobotics Challenge
Recent advances in the design and fabrication of microelectromechanical systems (MEMS) have enabled the development of mobile microrobots that can autonomously navigate and manipulate in controlled environments. It is expected that this technology will be critical in applications as varied as intelligent sensor networks, in vivo medical diagnosis and treatment, and adaptive microelectronics. However, many challenges remain, particularly with respect to locomotion, power storage, embedded intelligence, and motion measurement. As a result, NIST has organized performance-based competitions for mobile microrobots that are designed to: 1) motivate researchers to accelerate microrobot development, 2) reveal the most pressing technical challenges, and 3) evaluate the most successful methods for locomotion and manipulation at the microscale (e.g., actuation techniques for crawling). This yearŐs event will include two challenge tasks ( mobility and microassembly), a freestyle demo, and a poster session.
More details can be found at https://www.nist.gov/el/isd/mmc or by contacting Jason Gorman (jason.gorman@nist.gov).
DARwIn-OP Humanoid Application Challenge
Objectives:
DARwin-OP is an open platform humanoid project supported by NSF. Being a vision-capable humanoid with full functionality and scalability, researchers are strongly required to join an open source community for cooperative research. (www.robotsource.org)
To encourage creative applications from around the globe and maximize contribution for humanoid research.
Registration:
Teams (1-4 members) who use DARwin-OP robot to develop their own application are eligible. Projects using customized hardware or simulation only are also welcome.
Participants required to deliver:
1 minute video demonstration (for online registration and review)
All participants are entitled to receive Webots Pro 90 day License (1 each)
For Finalists selected to make presentation at ICRA:
5 minutes free-style demonstration (within 1 meter x 1 meter square table)
5 minutes presentation of project (PPT explanation of robotŐs functions and technologies)
All necessary equipment and items must be prepared by each participating team.
Important Dates:
Online Video Registration - February 10, 2012
Notification of Finalist - March 10, 2012
Final Presentation - TBD (at ICRA 2012)
Judging Criteria:
Creative Idea - 40%
Technical Skills - 30%
Overall Completion - 30%
Judging Committee:
Professor Dennis Hong (Virginia Tech)
Professor Daniel Lee (University of Pennsylvania)
Peer review among finalists
For more details, please visit www.robotsource.org or contact Kayla Kim (info@robotsource.org)
The Manufacturing Challenge
This will be the fourth year of this simulation-based challenge which is designed to stimulate research in robotics dealing with problems related to mixed-palletizing and intra-factory package delivery and logistics.
CHALLENGE EVENTS
This year's events will include two challenges. Each challenge will have multiple events and teams can participate in one or more events.
(1) Mixed Palletizing Challenge:
This challenge is designed to explore algorithms and techniques to address the three dimensional cutting stock problem, a variant of the combinatorial non-deterministic polynomial-time hard (NP-hard) knapsack problem. Teams will create and evaluate pallet optimal packing plans using XML schemas, a Pallet Viewer application and the USARSim simulation framework.
(2) Mobility & Task Completion Challenge:
The events of this challenge are designed to address the need for one or more factory robots to operate in unstructured environments amongst dynamic obstacles. Teams will use the USARSim simulation framework to deliver completed pallets throughout a simulated warehouse environment.
TEAMS
Teams of one or more researchers, students and faculty may participate in the competition. Teams have the option to be physically present for the challenge events or, participate remotely from their home institution. New and multi-disciplinary teams that foster collaboration and include researchers from other disciplines (ex. operations research, systems engineering, applied mathematics) are especially encouraged to participate.
WHAT'S NEXT?
Interested participants should submit a brief team description, affiliation and the challenge events your team intends to participate in to roboSim@nist.gov by January 1, 2012.
If you have any questions, contact George Dimitoglou (dimitoglou [at] hood.edu)

 This year a new Mobile Manipulation Challenge will show off the state of the art in integrated perception and manipulation. The challenge models a set of "sushi boat" restaurant tasks: clearing a table, setting a table, and serving from a rotating table.
We will run this challenge at two scales: human and mini. The human scale will use real tables and chairs and dishes. The mini scale will be suited for smaller robots.
Participants are welcome to bring their own robots and software, or to make use of Willow GarageŐs PR2 robots (human scale) or KukaŐs YouBot robots (mini scale) for the challenge. Simulations of the space at both scales will be available in advance.
More information will be available at MobileManipulationChallenge.org.
This year a new Mobile Manipulation Challenge will show off the state of the art in integrated perception and manipulation. The challenge models a set of "sushi boat" restaurant tasks: clearing a table, setting a table, and serving from a rotating table.
We will run this challenge at two scales: human and mini. The human scale will use real tables and chairs and dishes. The mini scale will be suited for smaller robots.
Participants are welcome to bring their own robots and software, or to make use of Willow GarageŐs PR2 robots (human scale) or KukaŐs YouBot robots (mini scale) for the challenge. Simulations of the space at both scales will be available in advance.
More information will be available at MobileManipulationChallenge.org.