Organised by: Tiefeng Li, Wei Song & Zheng Chen – Zhejiang University
Guoying Gu, Shanghai Jiao – Tong University
Jian Zhu – National University of Singapore
Website: https://sites.google.com/view/softrobotchallenge2018
Team Names:
Soft Component Technology Challenge
- Zheng Chen (Zhejiang University, China)
- Lillian Chin (MIT, USA)
- Tiefeng LI (Zhejiang University, China)
- Gursel Alici (University of Wollongong,Australia)
- Wei Song (Zhejiang Univeristy, China)
- Hao Deng (University of Chinese Academy of Sciences, China)
- Yi Sun (SGP, Singapore)
- Yong Bin Jin (Zhejiang University, China)
Gripping Challenge
- Lillian Chin (MIT, USA)
- Gursel Alici (University of Wollongong,Australia)
- Jie Zhang (Zhejiang Univeristy, China)
The Soft Material Robot Challenge invites participants from across the world to demonstrate their robots actuated using soft materials. This challenge provides an international platform to showcase soft robotics research and aims to promote research in the field of soft robotics and applicability to on-field competence. The challenge includes 2 categories.
A. Soft component technologies challenge.
This section aims to showcase newly developed soft robot technologies, including new actuators, sensors or other component technologies that advance the field of soft robotics. The entries will be judged for significance, originality, functionality and quality of documentation. The shortlisted entries will be required to demonstrate their prototype at the competition venue in ICRA 2018 (8 minutes for presentation and 2 minutes for answering questions).
B. Soft robots Grip competition.
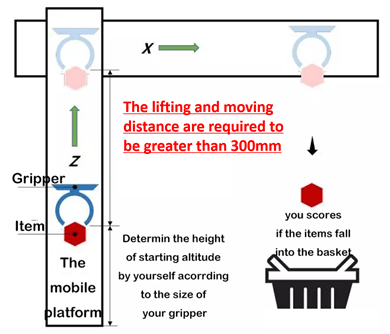
This section aims to pick the most effective soft robot for gripping tasks. Objects with various shapes, stiffness and weights will be set for the soft gripper to grip and transport.
The teams are required to abide by the following regulations in designing their robots:
(1) The gripper must be made of soft materials. Rigid parts and motors can be used to assist the movements of the soft gripper. Robots which are completely driven by soft actuators are highly encouraged.
(2) The dimensions of the robot cannot be larger than 0.5m×0.5m× 0.5m. Teams are free to use on‐board or off‐board power supply (bonus points for untethered robots ‐robots with on‐board power). Only inlet to 240 V power socket shall be provided. If a team chooses to use off‐board power sources, all the wires/conduits connecting to the robot should be slack at all times during the operations.