



BARN Challenge

The BARN Challenge aims at evaluating state-of-the-art autonomous navigation systems to move robots through highly constrained environments in a safe and efficient manner. The task is to navigate a standardized Clearpath Jackal robot from a predefined start to a goal location as quickly as possible without any collision. The challenge will take place both in the simulated BARN dataset and in physical obstacle courses at ICRA2022.
- Contact: Xuesu Xiao, xiao@cs.utexas.edu
For more information and to apply visit:
Competition Results:
- 1st place: The University of Texas at Austin -- Shravan Ravi; Gary Wang; Haresh Karnan; Joydeep Biswas
- 2nd place: The University of Virginia -- Nicholas Mohammad; Lauren Bramblett; Rahul Peddi; Nicola Bezzo
- 3rd place: Temple University -- Zhanteng Xie; Philip Dames
General Place Recognition Competition (GPR-Competition)
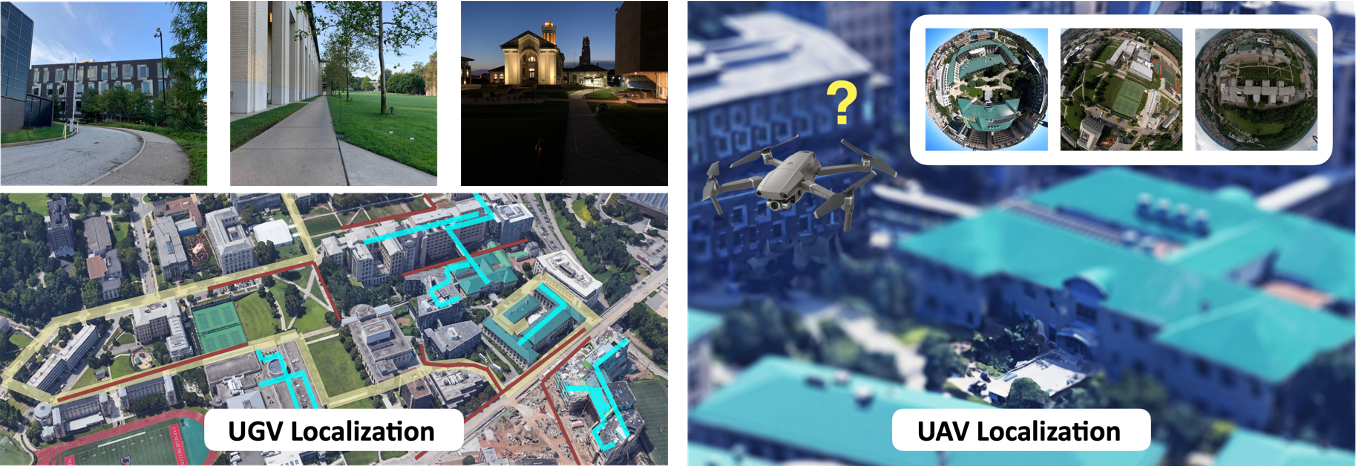
The ability of mobile robots to recognize previously visited or mapped areas is essential to achieving reliable autonomous systems. Place recognition for localization and SLAM is a promising method for achieving this ability. However, current approaches are negatively affected by differences in viewpoint and environmental conditions that affect visual appearance (e.g. illumination, season, time of day), and so these methods struggle to provide continuous localization in environments that change over time. These issues are compounded when trying to localize in large-scale (several-kilometer length) maps, where the effects of repeated terrain and geometries result in greater localization uncertainty. This competition aims to push visual and Lidar state-of-the-art techniques for localization in large-scale environments, with an emphasis on environments with changing conditions. We focus on capturing scenarios relevant for Unmanned Ground Vehicles (UGVs) and Unmanned Aerial Vehicles (UAVs). The competition provides four large datasets with their associated metrics. The first two datasets capture campus- and city-scale environments, and they contain a combination of visual and Lidar data that would be measured by a typical UGV. The second two datasets capture campus- and state-scale aerial environments using omnidirectional and nadir-facing cameras that would be typical of a UAV.
- Contact: Peng Yin, pyin2@andrew.cmu.edu
For more information and to apply visit:
Competition Results for Round 1:
City-scale Localization Track:
- 1st place: Dr. Lineng Chen, Dr. Jin Xie, and Dr. Mingwu Ren, "Ensemble Learning".
- 2nd place: Dr. Kavisha Vidanapathirana, "LoGG3D-Net: Locally Guided Global Descriptor Learning for 3D Place Recognition".
- 3rd place: Prof. Jacek Komorowski, "MinkLoc3Dv2: Improving Point Cloud Based Place Recognition with Ranking-based Loss and Large Batch Training".
UAV visual Terrain Localization Track:
- 1st place: Haiyi Liu, Minghao Liu, "Simple Solution Based on NetVlad".
- 2nd place: Dr. Guangyan Chen, and Dr. Linzhe Shi, "NetVLAD with double triplet loss".
Round 2 challenge will start from 06/01/2022 to 09/01/2022.
RoboMaster University Sim2Real Challenge

RoboMaster University Sim2Real Challenge at ICRA 2022 is co-organized by Institute for AI Industry Research (AIR), Tsinghua University and Da-Jiang Innovations (DJI). The goal of the challenge is optimizing the system performance of a real-world robotic task which consists of perception, navigation and manipulation. Participants can conduct unrestrained experiments in the simulator and can not directly access the real-world robot. Correspondingly, organizers will receive submissions from participants and complete the real-world deployment and the system validation at restrained time periods.
- Contact: robomaster@air.tsinghua.edu.cn
For more information and to apply visit:
RoboMaster University AI Challenge
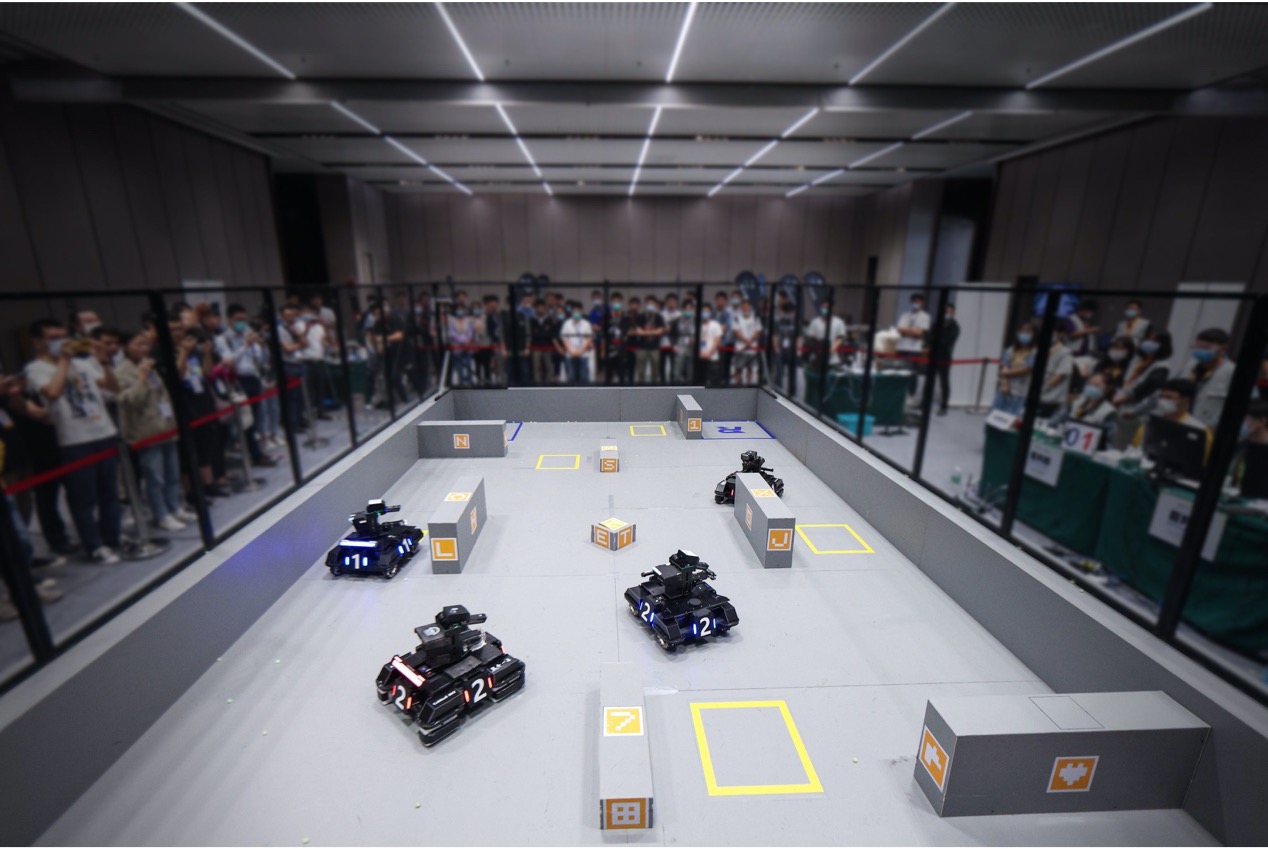
The RMUA focuses on the application of mobile robotics algorithm in an integrated context. Teams need to master multiple aspects of algorithm knowledge, such as positioning, motion planning, target detection, autonomous decision-making and automatic control.In RMUA 2022, automatic robots from both sides (2V2) shoot against each other in a rune-filled battlefield. Teams use the official platform to conduct motion planning, control and autonomous decision making by sensing the battlefield. The fully autonomous robots launch projectiles against the enemy. The team with the highest robot HP wins.
- Contact: robomaster@dji.com
For more information and to apply visit:
Competition Results:
- 1st place: Virginia Tech
- 2nd place: University of Illinois Urbana-Champaign
- 3rd place: Purdue University and Penn State University
10th F1TENTH Autonomous Grand Prix
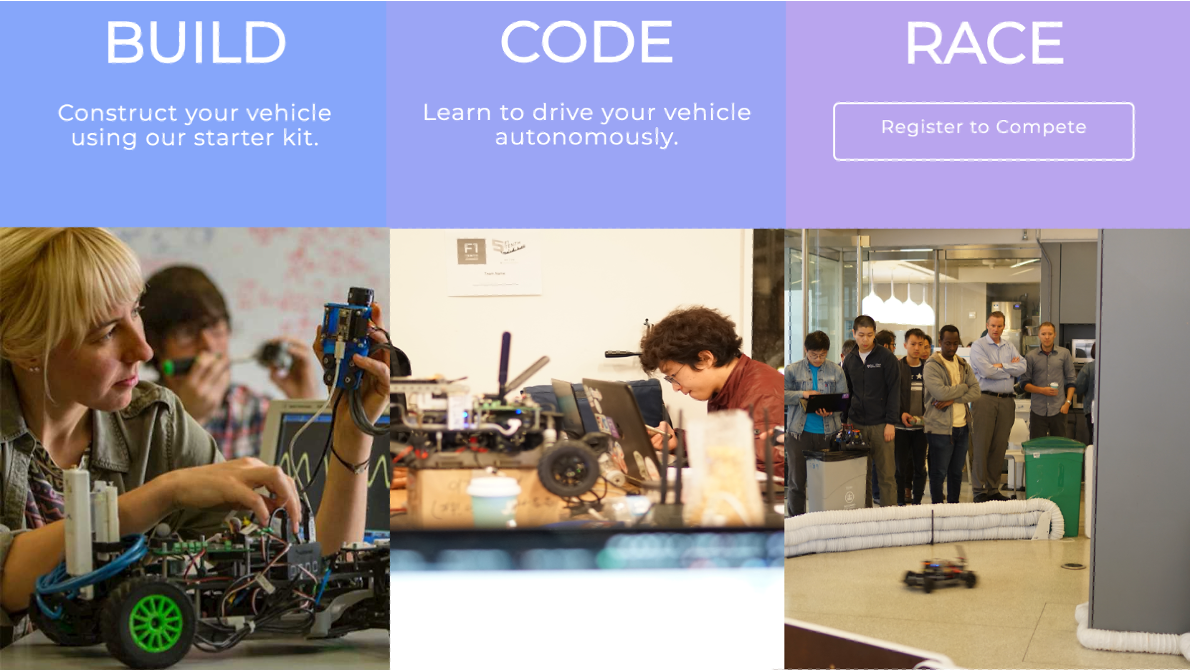
The teams participating in 10th F1TENTH Grand Prix at ICRA 2022 will build a 1:10 scaled autonomous race car according to a given specification and write software for it to fulfill the objectives for the competition: Race head-to-head, Don’t crash and minimize laptime. Each team will bring their own physical F1TENTH car with their own written software. The organizers provide the race setup (rules, submissions, guidelines), the track, related infrastructure and organize the race itself.
- Contact: Johannes Betz - joebetz@seas.upenn.edu
For more information and to apply visit:
Competition Results:
- 1st place: Team ScatteredBrain (Upenn)
- 2nd place: Team Dzik (Poland),
- 3rd place: Team Scuderia Segfaults (TU Vienna)
DodgeDrone: Vision-Based Agile Drone Flight

Would you like to push the boundaries of drone navigation? Then participate in the dodgedrone competition! You will get the chance to develop perception and control algorithms to navigate a drone in both static and dynamic environments. Competing in the challenge will deepen your expertise in computer vision and control, and boost your research.
- Contact: Antonio Loquercio (loquercio@berkeley.edu)
For more information and to apply visit:
Competition Winners:
- Yvo Keuter -- TU Delft
- Haruki Kozuka -- University of Tokyo
Robotic Grasping and Manipulation Competitions (RGMC)
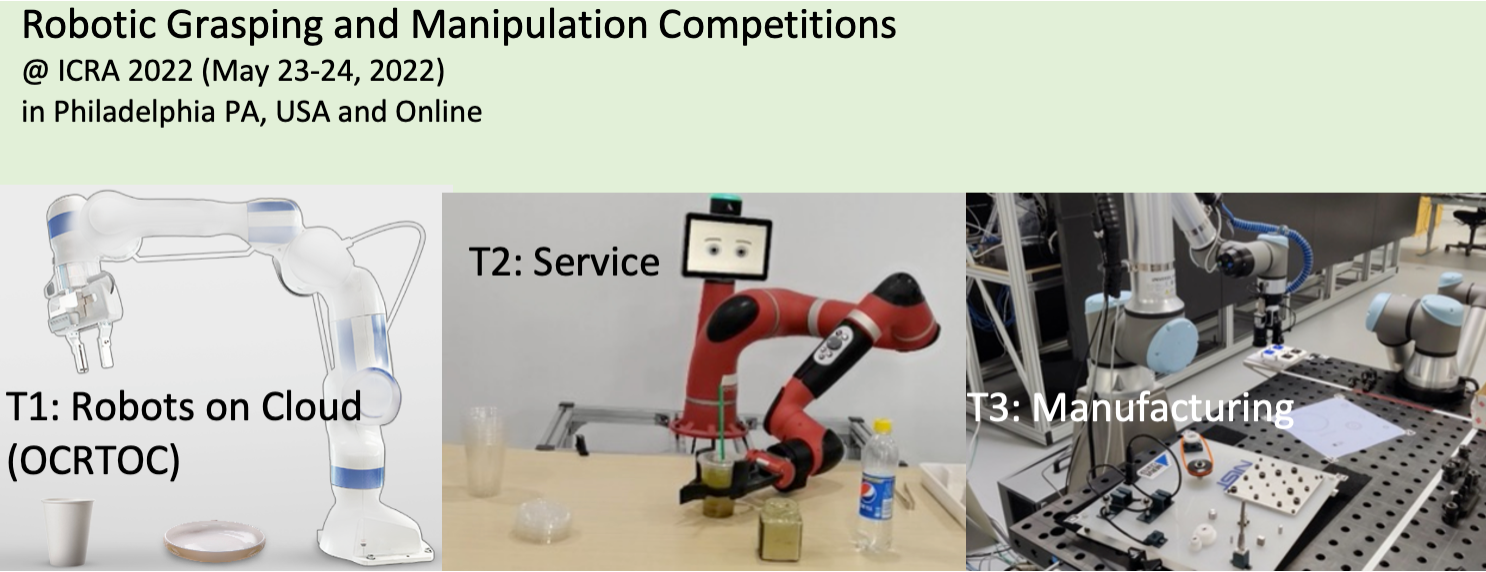
The 5th Robotic Grasping and Manipulation Competitions (RGMC) at ICRA 2022 has three tracks: OCRTOC, service, and manufacturing. The Open Cloud Robot Table Organization Challenge (OCRTOC) track provides a set of identical real robot setups and facilitates remote experiments of standardized table organization scenarios in varying difficulties. The service track has one task -- set a formal dinner table in three steps: set down dinner plates, a bowl, a glass, and a cup; place silverware and napkins around the plates; fill the glass and cup. The manufacturing track has two sub-tasks, wire harness construction, and assembly of a motor-driven belt-drive mechanism in the form of a NIST Task Board (NTB).
- Contact: Yu Sun yusun@mail.usf.edu
For more information and to apply visit:
Competition Results:
Open Cloud Robot Table Organization Challenge (RGMC-OCRTOC):
- 1st place: BUAA-GR: Haoxiang Ma, Ran Qin, Bowei Du, Jingze Dai, Boyang Gao, Di Huan
Affiliation: Beihang University, Geometry Robotics. - 2nd place: CASIA-Robot: Lili Wang, Yurou Chen, Hangtao Feng, Jianhua Su, Zhiyong Liu
Affiliation: Institute of Automation, Chinese Academy of Sciences. - 3rd place: Lumos: Vishal Reddy Mandadi, Shankara Narayanan V., Aditya Agarwal, Bipasha Sen, Madhava Krishna, Abhishek Chakraborty, Brojeshwar Bhowmick
Affiliation: International Institute of Information Technology, Hyderabad and TCS Research.
Manufacturing Track:
- 1st place: Team JAKS: Tokuo Tsuji, Riku Kobayashi, Takayuki Yamabe, Tatsuya Ishichi, Harumasa Ishisaki
Affiliation: Kanazawa University. - 2nd place: Team CASIA-YIT-Tencent: XiaoDong Zhang, Bin Hu
Affiliation: Institute of Automation, Chinese Academy of Sciences. - 3rd place: Team New Dexterity: Minas Liarokapis, Felipe Sanches, Geng Gao, Joao Buzzatto, Gal Gorjup
Affiliation: University of Auckland/ Acumino.
Towards Robust Autonomous Driving: The SeasonDepth Prediction Challenge
![]()
To facilitate the deployment of robust autonomous vehicles systems, we introduce the SeasonDepth Prediction Challenge as the first open-source challenge focusing on depth prediction performance under different environmental conditions for lifelong trustworthy autonomy in the application of outdoor mobile robotics and autonomous driving.
- Contact: Hanjiang Hu, email: hanjianghu@cmu.edu
For more information and to apply visit:
Competition Results:
Supervised Learning Track:
- 1st place: GD-VTC (Feng Xiong, et al.), from Alibaba Group.
- 2nd place: HUSTEREO (Siyuan Xu, et al.), from Huazhong University of Science and Technology.
- 3rd place: Dumpling (Zhi Ling, et al), from MEGVII.
Self-supervised Learning Track:
- 1st place: Brandley Zhou (Hang Zhou), from University of East Anglia.
- 2nd place: Xiangjie (Jie Xiang, et al.), from Institute of Microelectronics of the Chinese Academy of Sciences.
- 3rd place: Jaehyuck (Jae-Hyuck Park), from Autonomous Driving Intelligence Research Section, ETRI (South Korea).
Roboethics Competition

Are you interested in designing robots with ethics in mind? We are calling all roboticists, philosophers, designers, and engineers!
Join the 2022 ICRA Roboethics Competition to contribute to the frontier of robot ethics research. This competition is composed of two challenges. The first one is the Ethics Challenge where we are looking for proposals on how to identify and address ethical issues in the given scenario. The second challenge is a Hackathon where proposals from the first challenge will be implemented in code. Participants can choose to participate in either one or both of the challenges. Our aim is to enable people from different disciplinary backgrounds to join the challenge.
Why is this important?
Robot ethics poses some of the greatest challenges in interactive robot designs. In many cases, humans navigate ethical and social situations with ease, whereas it may be much more difficult for a robot. For example, if a child asks a robot to fetch his/her parent's credit card, what should the robot be programmed to do? This competition will challenge you to think about ethics as concrete design considerations that can be implemented as interactive robot behaviours.
- Contact: roboethicscompetition@raiselab.ca
For more information and to apply visit:
Competition Results:
- Award 1: Best Ethics Challenge: “Good Things Come in Trees: Emotion and Context Aware Behaviour Trees for Ethical Robotic Decision-Making” from Simon Fraser University
Paige Tuttösí (PhD Candidate) , Zhitian Zhang (PhD Candidate), and Emma Hughson (MSc) - Award 2: Honourable Mention for Ethics Challenge: “R2D2 - Risk Ratings Database for Ethical Decision Making” from the University of Toronto
Cristina Getson (PhD Student), Michael Pham-Hung (Masters Student) - Award 3: Best implementation:
Jean-Christophe Sicotte-Brisson, Ecole de technologie superieure, École de technologie supérieure (ETS) - Award 4: Best implementation:
“Ethical Home Robot” Sachin Pullil, University of Pennsylvania
RoboJawn: FIRST LEGO League Challenge

In FIRST LEGO League Challenge, teams of 4th-8th graders design, build, and program a LEGO robot to complete autonomous missions to score points. This year's challenge, CARGO CONNECT, invites teams to explore the ways that goods are transported around the world. In addition to the robot missions, teams have completed Innovation Projects related to the season theme. Spectators are invited to watch the robot matches, view the project posters, and talk with the students about their robots and projects.
Schedule: Thursday May 26, robot matches and poster session 10:00am–1:00pm
Different groups of students will be at the competition tables and at their posters each hour, so feel free to swing by multiple times.
FIRST is a New Hampshire-based nonprofit that runs robotics competition programs for pre-K through 12th grade students around the world. Locally, the Philadelphia Robotics Coalition supports over fifty teams in the FIRST LEGO League Explore, FIRST LEGO League Challenge, and FIRST Tech Challenge programs. Through these FIRST programs, the Coalition builds equitable access to STEM fields for Philadelphia public school students.
- Event Director: Michael Johnson, michael@roboticscoalition.org
For more information and to apply visit: